- 康復機器人系列

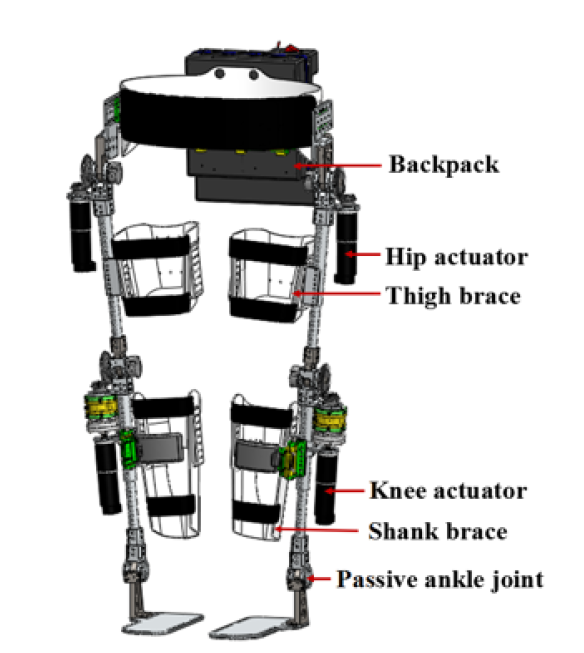
為下肢截癱病人設計了一款動力下肢外骨骼,幫助截癱病人實現了站立、坐下、行走等功能,下肢外骨骼的驅動器采用電機結合磁流變制動器以及柔性彈簧降低了驅動器功耗。采用了電機與磁流變制動器串聯從而降低驅動器功耗。提出了基于腳底地面作用力分布,采用半馬爾可夫模型預測下肢運動功能障礙患者的病態步態,從而控制動力膝關節矯形器幫助患者實現行走功能,曾發表在康復醫療頂級期刊TNSRE上。







